I was previously a Signal Integrity Intern at AMD working on innovative tools to assist signal integrity and power integrity engineers. I graduated from North Carolina State University in May 2024, completing a double major in Electrical and Computer Engineering. My work experience includes roles at Intel as a packaging engineer intern and at Edwards Vacuum as an EE-HW intern.
As an engineer, I’m passionate about developing new solutions through Python programming, Verilog, PCB design, and more. I enjoy tackling new challenges through innovative engineering projects.
When I'm not in front of a computer screen, I'm probably trying to DIY a random project, or rock climbing!
Currently working on:
🛹 Building an entirely DIY electric skateboard
👀 Learning how to apply computer vision to my IOT Car
🎹 Working on my lofi hip-hop album
🎥 Watching every bad movie every made (Nicholas Cage is in 30% of them)
🐲 Beating the ender-dragon in Minecraft
Developed Python-based CAD tools for Signal Integrity and Power Integrity engineers. Launched an auto-routing tool project using the A* algorithm and automated layout generation, cutting engineering time significantly.
Worked on PCB package design for DDR, UCIe, and other Intel packages. Collaborated with multiple teams for simulation, electrical modeling, and drafting manufacturing documents.
Designed circuit board schematics in Altium, performed reliability testing, and ensured electronics compliance with industry standards.
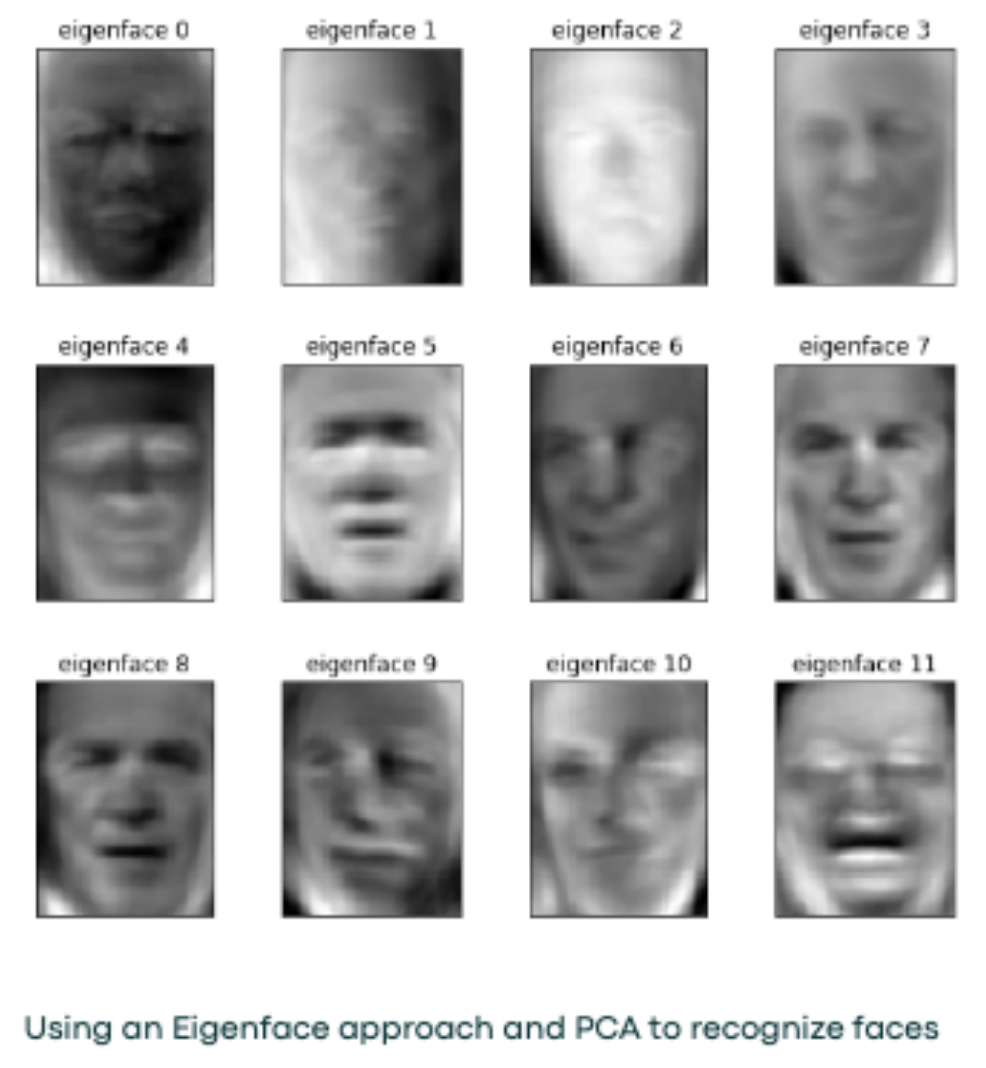
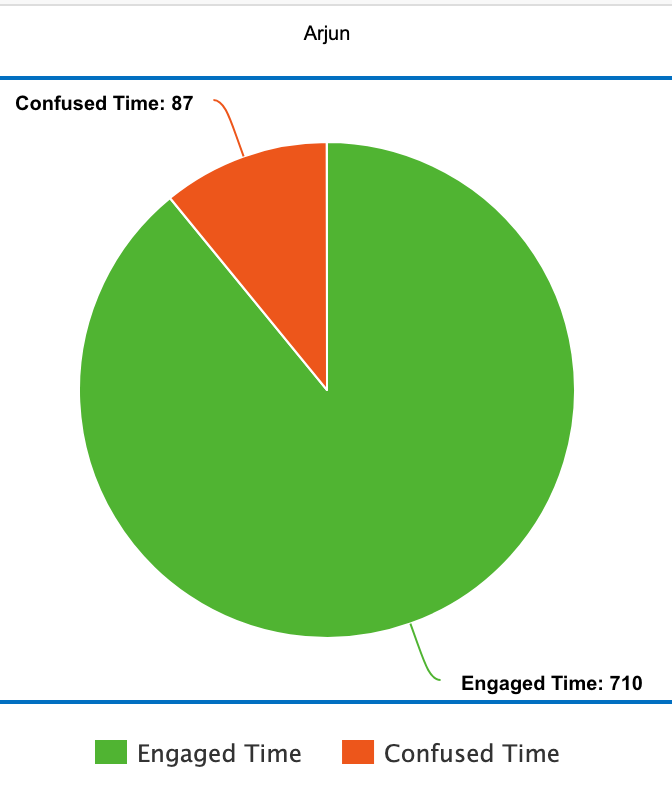
This project was developed as part of a Neural Networks class and was presented at the Machine Learning Symposium as a Final Project. The system was designed to detect faces and determine student engagement in a classroom setting using advanced machine learning techniques. Specifically, the team implemented an Eigenface and Principal Component Analysis (PCA) approach for face detection, which involved training a model using 10 images and storing this training data (facial features) and using the training data to identify and match faces. Additionally, the team used a pre-trained engagement detection model to determine student engagement levels, which were then appended to a student engagement report for instructors.
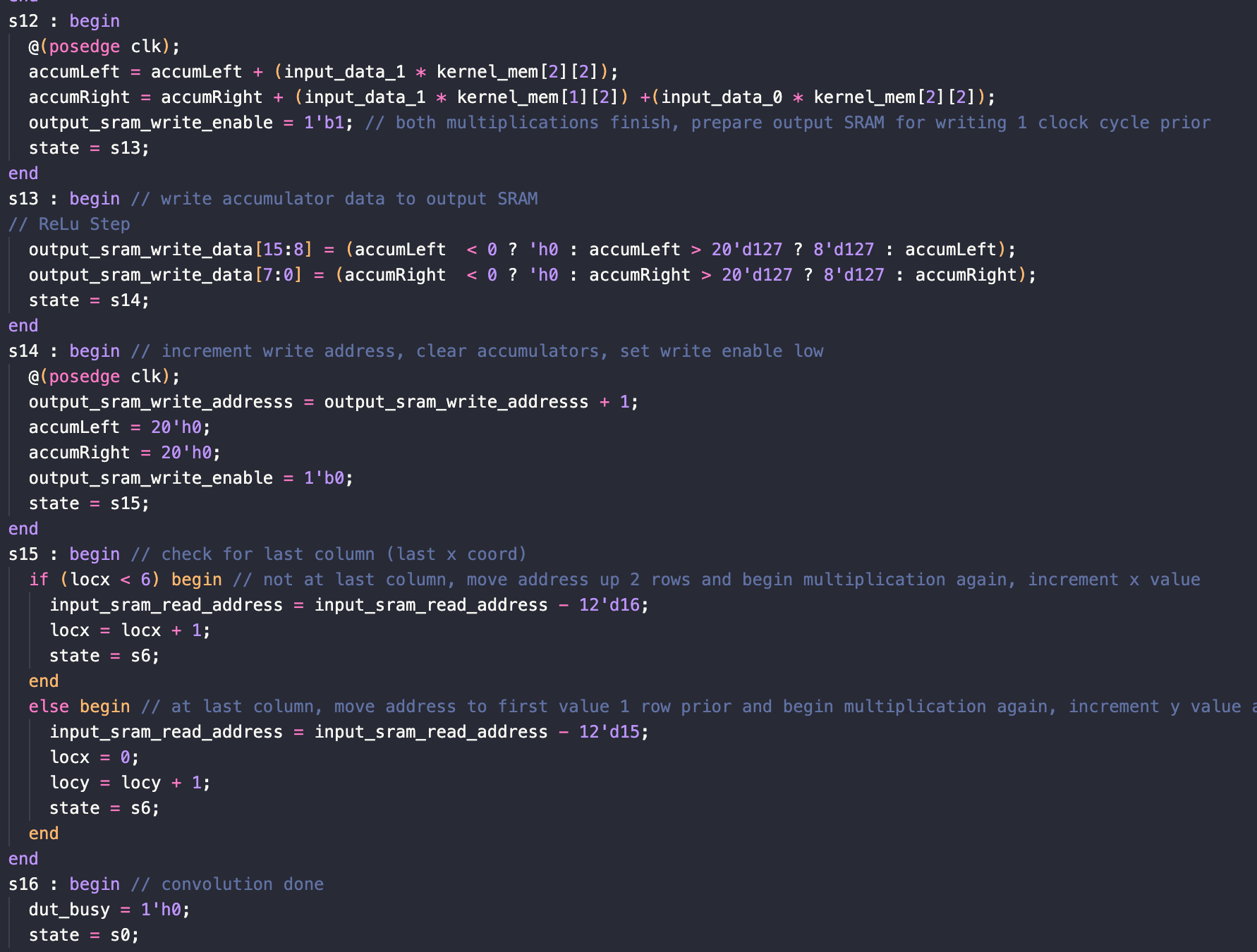
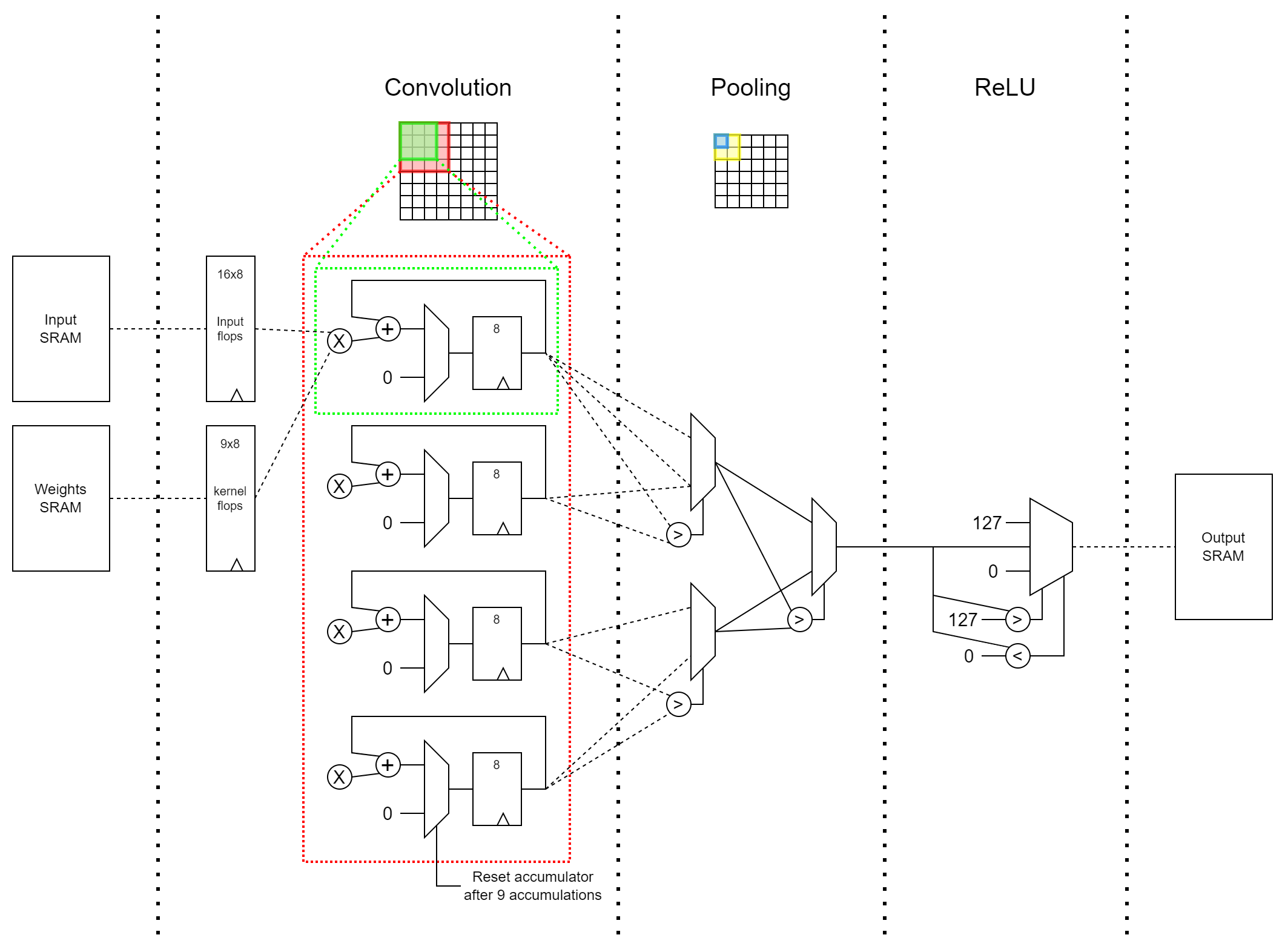
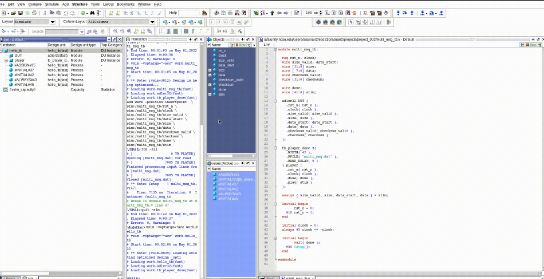
A hardware-based multi-stage neural network, including a convolutional layer, a fully connected layer and a max pooling layer.
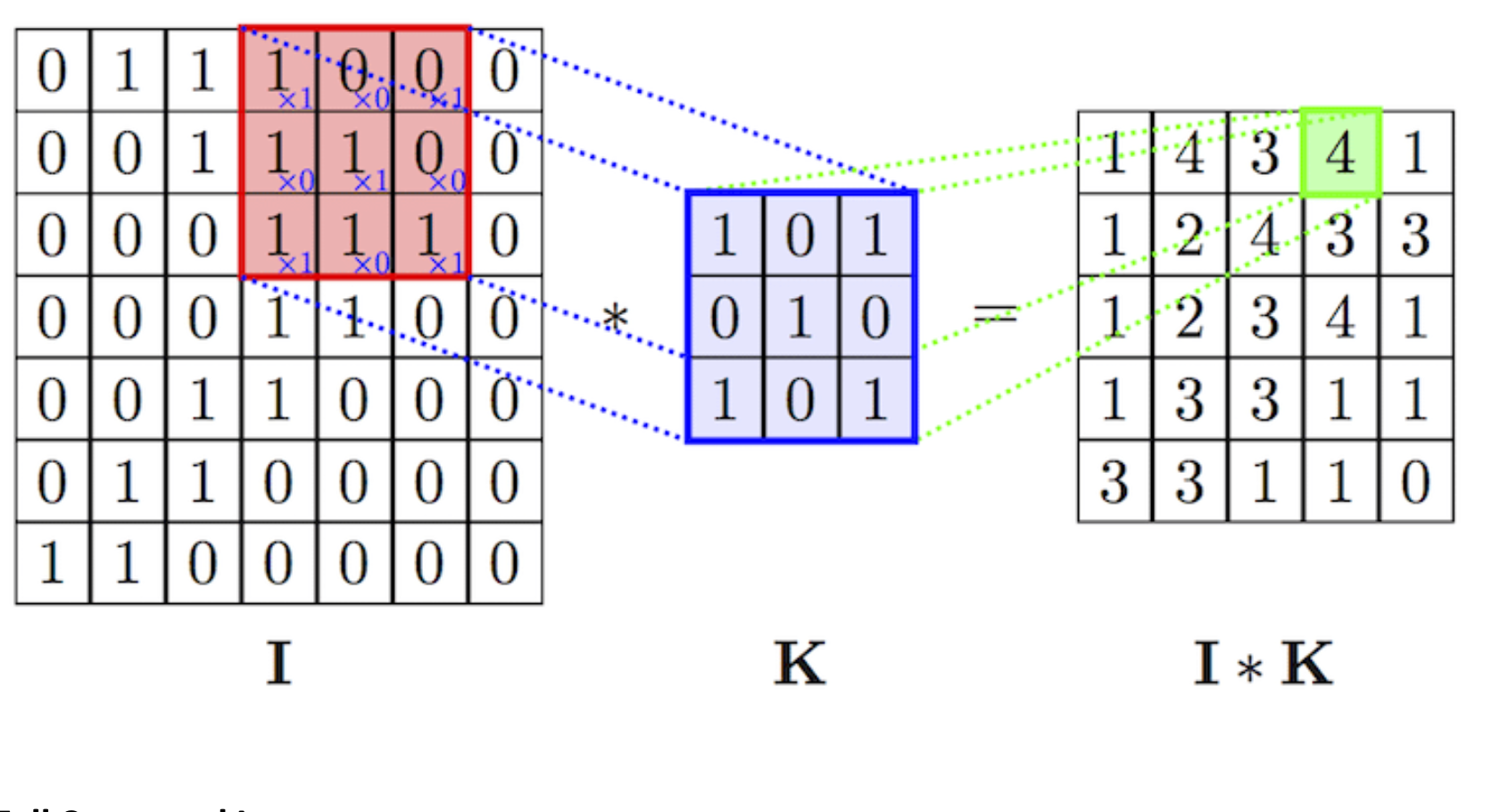
From a top down perspective the goal of the project is to initially read from a given weights SRAM, store the given weights into registers. Following this you read from the input SRAM to multiply a 3x3 section of the input data with the 3x3 weight matrix and produce an output value. To simplify this process using the given SRAM constraints etc. my approach was to read a 3x4 window from the input SRAM rather than a 3x3 window or the entire SRAM itself. Using a 3x4 window allows the design to compute two matrix calculations since both calculations share values amongst each other. Both these calculations are then stored into their respective accumulators (left and right).
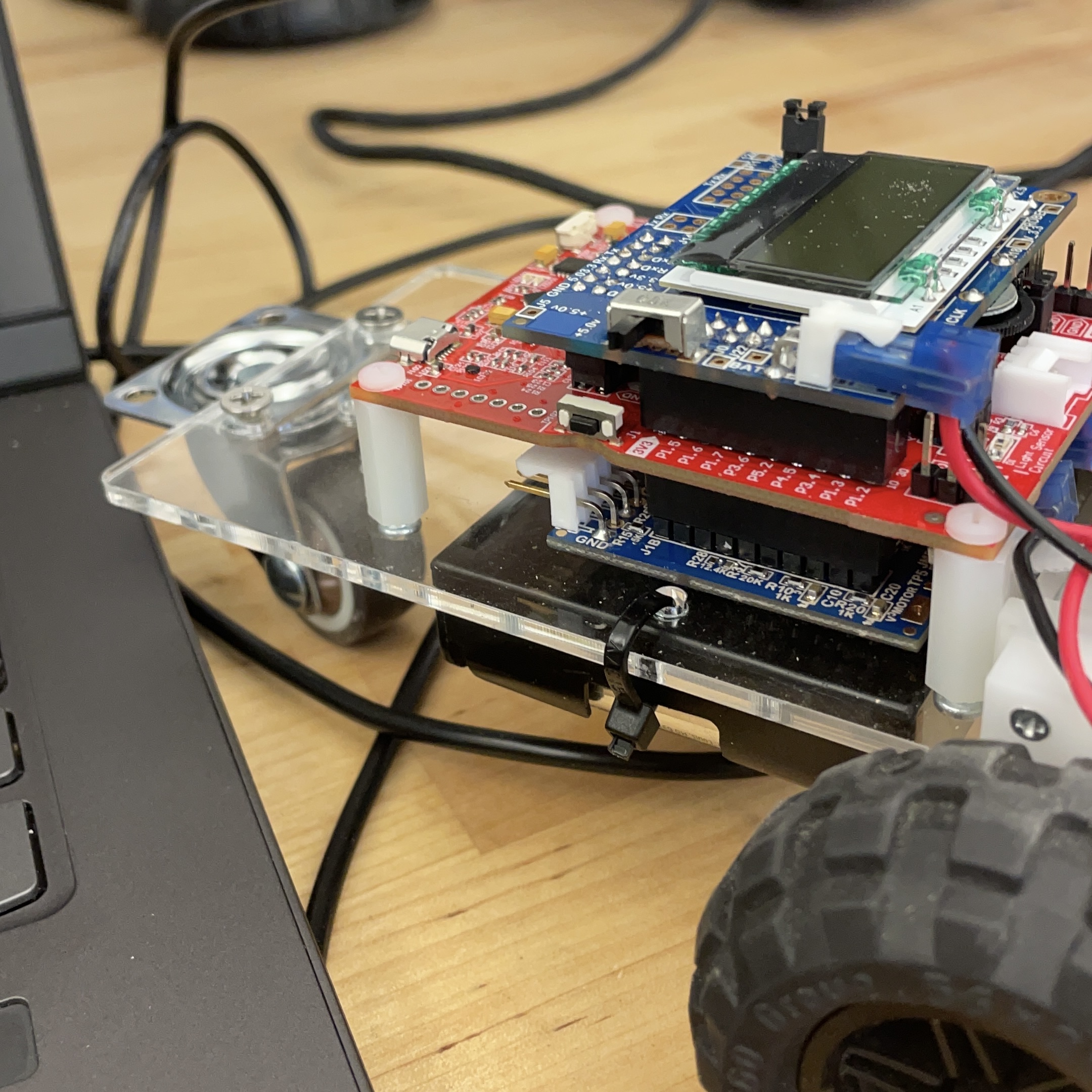

I soldered and programmed MSP-430 board in C to work in conjunction with 2 DC motors and onboard IR emitter and detector to allow blackline detection. Additionally, I implemented Pulse-Width-Modulation to control wheels using onboard clocks and timers, and used an IOT module to control car navigation via WiFi using a custom interface. Moreover, I created H-Bridge board with pFETs and nFETs to allow forward and reverse control, along with power board consisting of 4 AA battery pack.
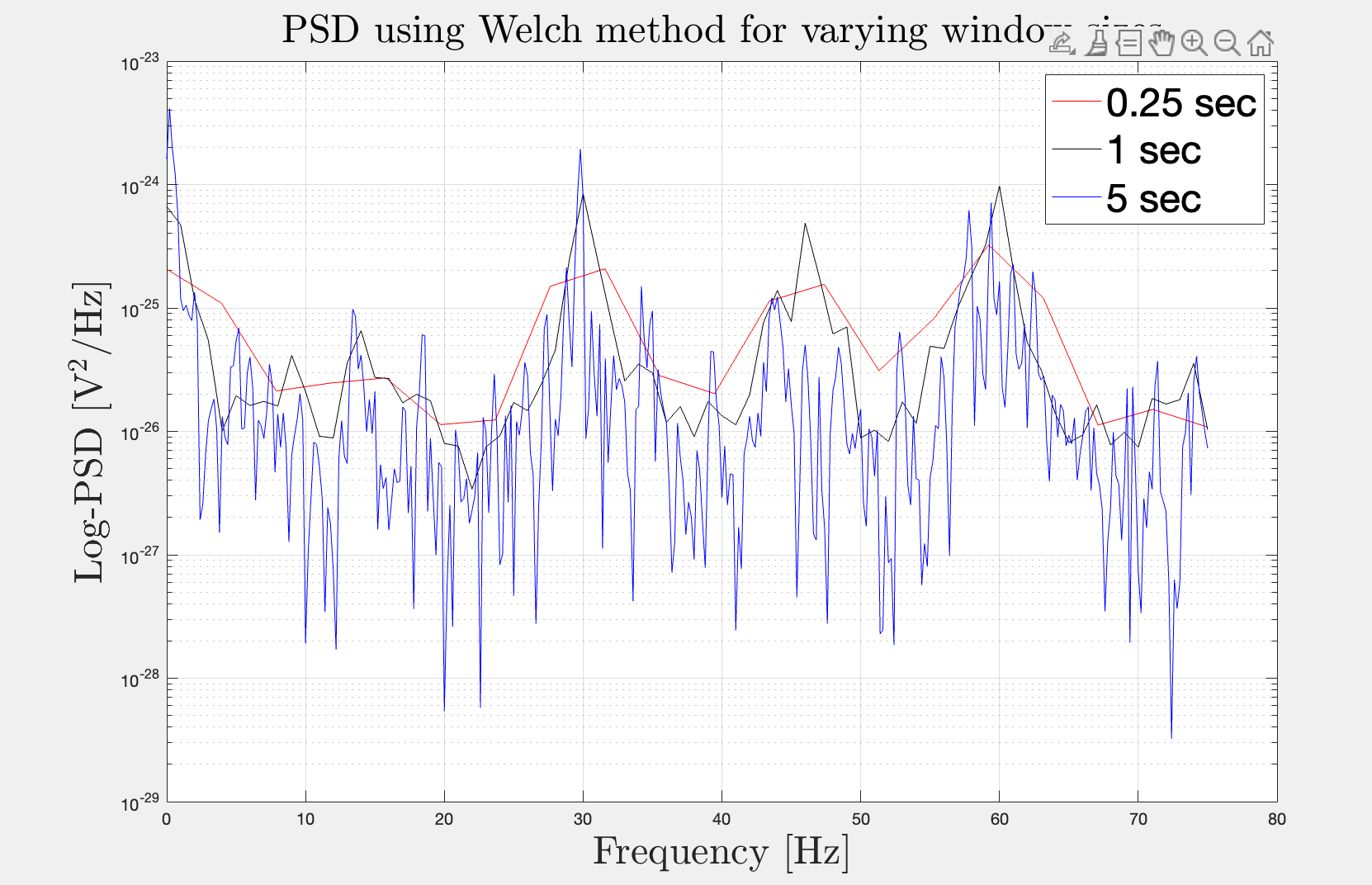
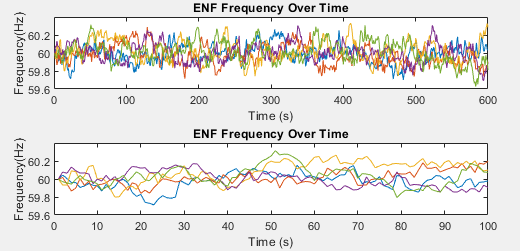
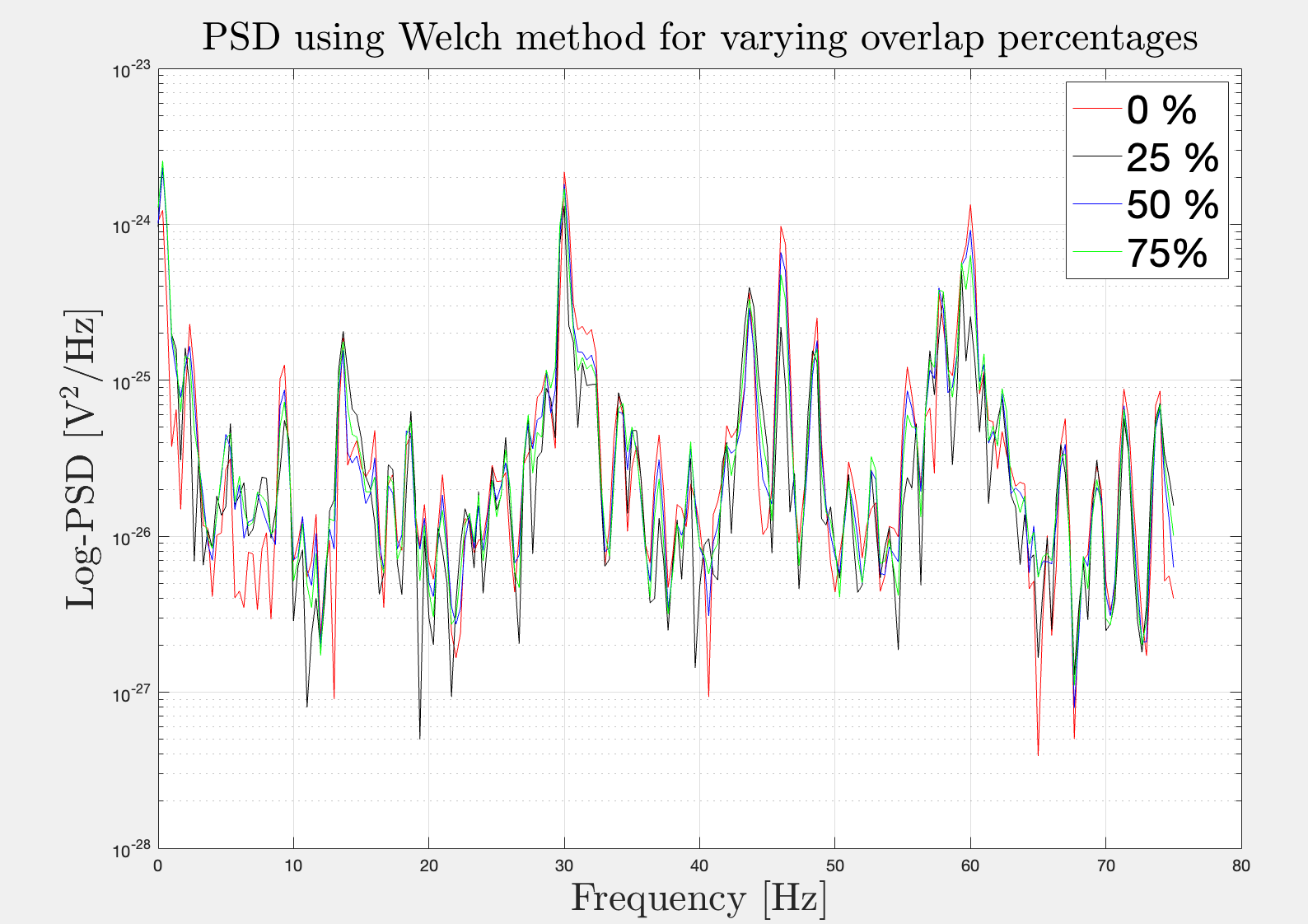
The electric network frequency (ENF) in the US has a nominal value of f 0 = 60Hz and its instantaneous value fluctuates round the nominal value as a function of time. The ENF signals can be captured by audio or video recordings made in areas where there is electrical activity. This makes the ENF a good criterion for the forensic analysis of a multimedia recording. Using MATLAB and other resources, we have created a program that can accurately capture and calculate several points of info from an ENF signal.
Custom UDP Python terminal to allow users to connect to their IOT cars using a UDP server and control the car using WASD or Gamepad controls wirelessly.